کنترلر تناسبی-انتگرالی-مشتقی (proportional–integral–derivative controller) یا کنترلر PID یک مکانیزم بازخوردی (feedback mechanism) حلقه کنترل (control loop) است که معمولا در سیستمهای کنترل صنعتی استفاده میشود.
کنترل کننده PID به طور پیوسته مقدار خطا را به عنوان تفاوت بین یک ست پوینت مورد نظر و یک متغیر فرآیند اندازهگیری شده محاسبه میکند. کنترلر تلاش میکند که با تنظیم یک متغیر کنترل، مانند موقعیت یک شیر کنترلی (control valve)، دمپر (damper) و یا توان عرضه شده به یک المان گرمایشی به یک مقدار جدید تعیین شده بر اساس مجموع وزنی، خطا را در طول زمان به حداقل برساند:
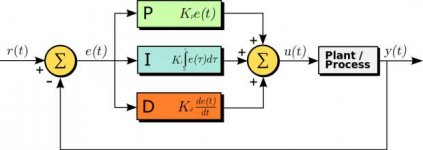
که در آن Kp، Ki و Kd همگی غیر منفی و نشاندهنده ضرایب عبارات تناسبی، انتگرالی و مشتقی هستند و گاهی به آنها به ترتیب P، I و D نیز گفته میشود:
P مقدار کنونی خطا را حساب میکند. برای مثال، اگر خطا بزرگ و مثبت است، خروجی کنترل نیز بزرگ و مثبت باشد.
I مقادیر گذشته را حساب میکند. برای مثال، اگر جریان خروجی به اندازه کافی قوی نیست، خطا را در طول زمان جمعآوری و کنترلکننده با یک عمل قویتر پاسخ میدهد.
D بر اساس نرخ فعلی تغییر خطا، مقدار آتی آن را حساب میکند.

تاثیر تغییر پارامترهای PID بر پاسخ پله سیستم
برخی از کاربردها برای ایجاد کنترل مناسب سیستم، نیاز به استفاده از تنها یک یا دو عبارت دارند. این کار با صفر قرار دادن پارامترهای دیگر به دست میآید. یک کنترلر PID در غیاب اقدامات کنترلی مربوطه ممکن است به نام کنترلر PI، PD، P و یا I خوانده شود. کنترل PI نسبتا متداول است زیرا عمل مشتق حساس به نویز اندازهگیری است؛ در حالی که عدم وجود یک عبارت انتگرالی ممکن است باعث شود که سیستم به مقدار هدف خود نرسد.
http://www.www.iran-eng.ir/attachment.php?attachmentid=259829&d=1472975910
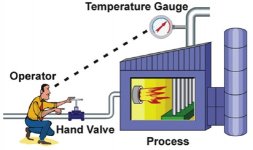
کنترل دستی فرآیند کنترل دما به وسیله اپراتور
http://www.www.iran-eng.ir/attachment.php?attachmentid=259830&stc=1
کنترل اتوماتیک فرآیند کنترل دما به وسیله یک کنترلر PID
کنترل کننده PID به طور پیوسته مقدار خطا را به عنوان تفاوت بین یک ست پوینت مورد نظر و یک متغیر فرآیند اندازهگیری شده محاسبه میکند. کنترلر تلاش میکند که با تنظیم یک متغیر کنترل، مانند موقعیت یک شیر کنترلی (control valve)، دمپر (damper) و یا توان عرضه شده به یک المان گرمایشی به یک مقدار جدید تعیین شده بر اساس مجموع وزنی، خطا را در طول زمان به حداقل برساند:
http://www.www.iran-eng.ir/attachment.php?attachmentid=259827&d=1472975618
که در آن Kp، Ki و Kd همگی غیر منفی و نشاندهنده ضرایب عبارات تناسبی، انتگرالی و مشتقی هستند و گاهی به آنها به ترتیب P، I و D نیز گفته میشود:
P مقدار کنونی خطا را حساب میکند. برای مثال، اگر خطا بزرگ و مثبت است، خروجی کنترل نیز بزرگ و مثبت باشد.
I مقادیر گذشته را حساب میکند. برای مثال، اگر جریان خروجی به اندازه کافی قوی نیست، خطا را در طول زمان جمعآوری و کنترلکننده با یک عمل قویتر پاسخ میدهد.
D بر اساس نرخ فعلی تغییر خطا، مقدار آتی آن را حساب میکند.
http://www.www.iran-eng.ir/attachment.php?attachmentid=259828&d=1472975672
بلاک دیاگرام یک کنترلر PID در یک لوپ فیدبک
از آنجایی که یک کنترلر PID به جای نیاز به دانش از فرآیند زیربنایی، تنها بر متغیر اندازهگیری فرآیند شده متکی است، به طور گستردهای قابل کاربرد است. با تنظیم سه پارامتر از مدل، کنترلر PID میتواند الزامات خاص فرآیندی را برآورده کند. پاسخ کنترلر را میتوان بر حسب پاسخگویی آن به خطا توصیف کرد؛ که به صورت میزان نوسان سیستم در اثر پرش (overshoot) نسبت به ست پوینت خود را نشان میدهد. استفاده از الگوریتم PID، کنترل بهینه سیستم و یا حتی ثبات آن را تضمین نمیکند.بلاک دیاگرام یک کنترلر PID در یک لوپ فیدبک
تاثیر تغییر پارامترهای PID بر پاسخ پله سیستم
برخی از کاربردها برای ایجاد کنترل مناسب سیستم، نیاز به استفاده از تنها یک یا دو عبارت دارند. این کار با صفر قرار دادن پارامترهای دیگر به دست میآید. یک کنترلر PID در غیاب اقدامات کنترلی مربوطه ممکن است به نام کنترلر PI، PD، P و یا I خوانده شود. کنترل PI نسبتا متداول است زیرا عمل مشتق حساس به نویز اندازهگیری است؛ در حالی که عدم وجود یک عبارت انتگرالی ممکن است باعث شود که سیستم به مقدار هدف خود نرسد.
http://www.www.iran-eng.ir/attachment.php?attachmentid=259829&d=1472975910
کنترل دستی فرآیند کنترل دما به وسیله اپراتور
http://www.www.iran-eng.ir/attachment.php?attachmentid=259830&stc=1
کنترل اتوماتیک فرآیند کنترل دما به وسیله یک کنترلر PID
پیوست ها
-
 Formula.jpg10.1 کیلوبایت · بازدیدها: 0
Formula.jpg10.1 کیلوبایت · بازدیدها: 0 -
 Block-Diagram-of-a-PID-Controller-in-a-Feedback-Loop.jpg15.1 کیلوبایت · بازدیدها: 0
Block-Diagram-of-a-PID-Controller-in-a-Feedback-Loop.jpg15.1 کیلوبایت · بازدیدها: 0 -
 Manual-Control-by-Operator.jpg38.3 کیلوبایت · بازدیدها: 0
Manual-Control-by-Operator.jpg38.3 کیلوبایت · بازدیدها: 0 -
 Automatic-Control-by-PID.jpg39.9 کیلوبایت · بازدیدها: 0
Automatic-Control-by-PID.jpg39.9 کیلوبایت · بازدیدها: 0