موتورها و انتخاب درست آنها – بخش اول (مبانی الکترومغناطیس)
")
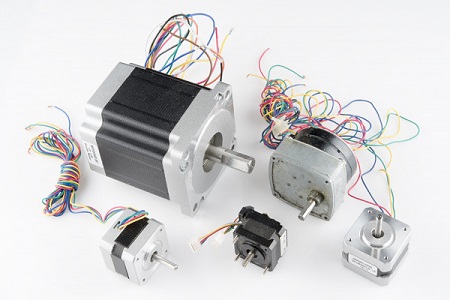
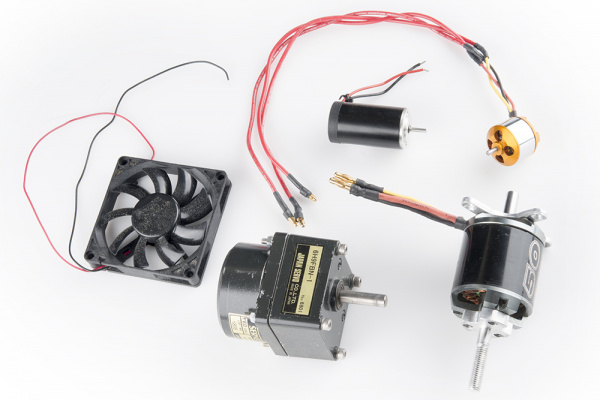
همیشه امکان وجود یک یا دو نوع موتور (Motor) در نزدیکی شما وجود دارد. از ویبره (Vibration) گوشی تلفن همراه تا پنکهها و درایو سیدی (CD drive) کامپیوتر، همه بیانگر وجود موتورها در اطراف ما هستند. موتورها، امکان تعامل و ارتباط بین وسایل مختلف با ما و محیط را فراهم میکنند. با توجه به کاربردهای بیشمار این وسایل، طراحی و عملکرد آنها متغیر است. در این پست و پست بعدی، به توضیح مبانی مربوط به انواع موتورها و کاربرد آنها خواهیم پرداخت. عناوینی که پوشش داده خواهند شد به صورت زیر است:
- موتورهای dc جاروبکدار یا موتورهای براش (DC Brush Motors)
- موتورهای بدون جاروبک یا موتورهای براشلس (Brushless Motors)
- موتورهای گامزن (پلهای) یا استپر موتورها (Stepper Motors)
- موتورهای خطی (Linear Motors)
چه چیزی باعث حرکت موتورها میشود؟
سادهترین جواب (و همچنین مبهمترین جواب) برای دلیل حرکت موتورها، مغناطیس است.
برای درک سادهتر برخی از مفاهیم، ابتدا باید از طریق آزمون فکری، آنها را بررسی کنیم. برای شروع، بهتر است بدانیم که یک میدان مغناطیسی، توسط حرکت الکترونها (جریان) به وجود میآید.
الکترومغناطیس
برای ساخت یک آهنربا یا یک میدان مغناطیسی، نحوه ایجاد آنها را بررسی میکنیم. زمانی که از یک سیم جریانی عبور میکند، میدان مغناطیسی در اطراف آن شکل میگیرد. رابطه بین جریان و میدان الکترومغناطیسی، از قانون دست راست تبعیت میکند.اگر دست راست خود را در اطراف این سیم فرض کنید، به گونهای که انگشت شست شما در جهت جریان درون سیم باشد، جهت چرخش میدان مغناطیسی، جهت چرخش دیگر انگشتان شما است (مطابق شکل زیر). این مثال سادهای برای بیان قانون نیروی آمپر در سیم حامل جریان است. حال اگر شما، همان سیم را در یک میدان مغناطیسی موجود قرار دهید، یک نیرو به وجود میآید. به این نیرو، « نیروی لورنتس - Lorentz force» گفته میشود.

قانون دست راست، جهت میدان مغناطیسی مربوط به مسیر جریان را نشان میدهد.
با افزایش جریان، قدرت میدان مغناطیسی نیز افزایش مییابد. اگرچه، استفاده مفید از این میدان، نیازمند مقدار قابلتوجهی از جریان است. علاوه بر این، سیمی حامل جریان الکتریکی، قدرت مغناطیسی مشابه ای را حمل میکند. از اینرو، میدانهای مغناطیسی غیرقابلکنترل ایجاد میشود. با خم کردن سیم به شکل یک حلقه، یک میدان مغناطیسی مستقیم و متمرکز ایجاد میشود.
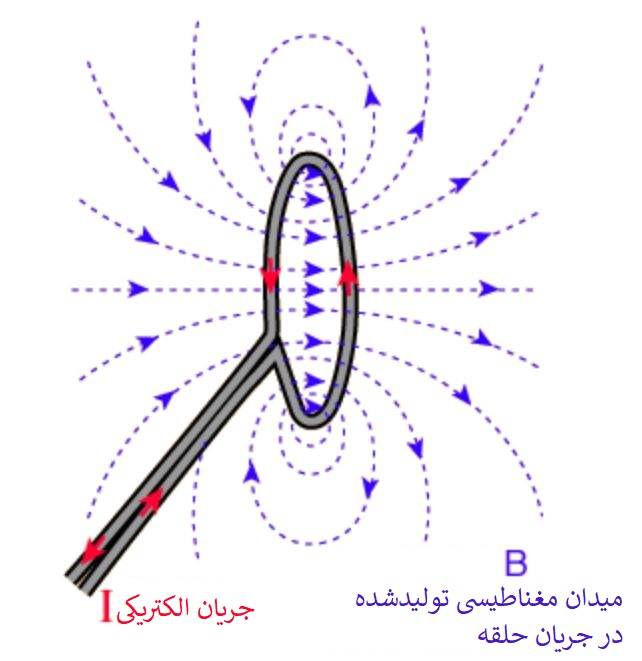
میدان تغییر نکرده است. با خم کردن سیم به شکل حلقه، جهات میدان به سادگی همراستا میشوند.
آهنربای الکتریکی
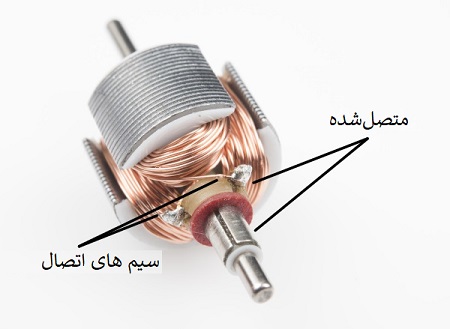
با حلقه کردن یک سیم حامل جریان، یک آهنربای الکتریکی (Electromagnet) ساخته میشود. برای یک جریان مشخص، هر چه تعداد حلقهها بیشتر باشد، میدان مغناطیسی قویتر خواهد بود. در طرف مقابل، هر چه تعداد حلقهها بیشتر باشد، طول سیم بیشتر شده و مقاومت افزایش مییابد. بر اساس قانون اهم (مقاومت*جریان=پتانسیل)، برای حفظ یک جریان ثابت در صورت افزایش مقاومت، ولتاژ نیز باید افزایش یابد. در برخی از موارد، امکان استفاده از سیمهای بلندتر با مقاومت کمتر وجود دارد. استفاده از سیمهای بلندتر، هزینهبر بوده و کار با آنها سختتر است. در هنگام طراحی یک موتور باید این عوامل را در نظر گرفت.
یک آهنربای الکتریکی در حال تولید میدان مغناطیسی
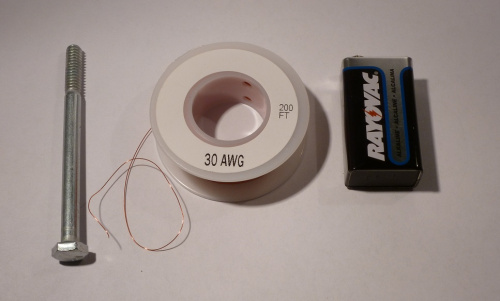
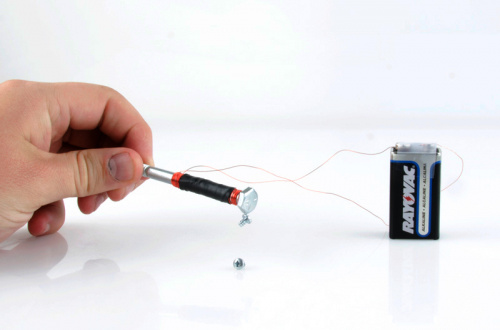
انجام آزمایش – ساخت آهنربای الکتریکی
برای ساختن یک آهنربای الکتریکی، تنها به یک پیچ (از میخ یا اشیاء فلزی مشابه نیز میتوان استفاده کرد)، مقداری سیم مسی و یک باتری نیاز دارید.توجه: باتریهای لیتیومی برای این آزمایش توصیه نمیشوند.
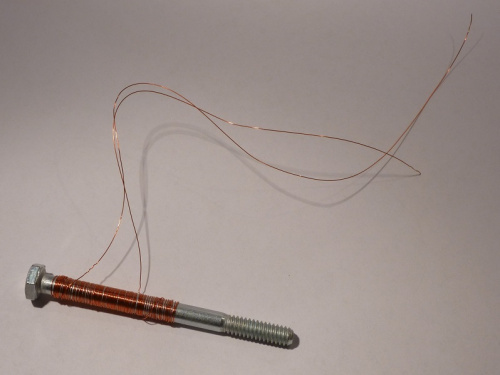
بین 75 تا 100 دور از سیم را به دور پیچ بپیچانید. استفاده از یک هسته فلزی باعث افزایش تمرکز میدان مغناطیسی شده و قدرت مؤثر آن را افزایش میشود. دلیل این امر را در بخش بعدی توضیح میدهیم.
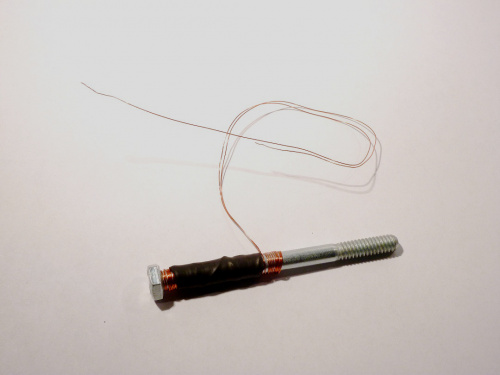
استفاده از روکش حرارتی یا چسب به دور پیچ، به نگه داشتم سیمپیچها در اطراف هسته فلزی کمک میکند.
انتهای سیمها را سمباده بکشید تا عایق آنها از بین برود. هر یک از طرفین سیمپیچ را به قطبهای باتری متصل کنید. تبریک میگوییم! شما موفق به ساخت اولین بخش از یک موتور شدید. برای امتحان کردن قدرت آهنربای الکتریکی خود، از آن برای برداشتن اشیاء فلزی کوچک استفاده کنید.
جادویی در کار نیست، این علم است!!!
فرومغناطیس
به آزمایش فکری خود بازگردیم. میدانهای مغناطیسی میتوانند توسط جریان به وجود آیند. مفهوم جریان را به صورت حرکت و جریان الکترونها در نظر بگیرید. چرخش الکترونها در اتم، جریان و سپس میدان مغناطیسی را به وجود میآورد. اکنون ممکن است این سؤال در ذهن شما به وجود آید: «اگر همهی اتمها دارای الکترون هستند، آیا همه چیز مغناطیسی است؟» جواب این سؤال، مثبت است. اگر انرژی لازم به هر چیزی داده شود (حتی یک قورباغه)، آن چیز میتواند از خود خواص مغناطیسی نشان دهد اما همهی مغناطیسها به صورت مشابه ساخته نمیشوند. حال، تفاوت بین مغناطیس تولیدشده از یک قورباغه با یک یخچال چیست؟ این تفاوت در مکانیسمهای «فرومغناطیس» و «فرامغناطیس» است. اختلاف بین این دو مکانیسم، در حوزه مکانیک کوانتومی است.در این آموزش، تمرکز ما بر پدیده فرومغناطیس خواهد بود. فرومغناطیس، قویترین مکانیسم در موضوع مغناطیس بوده و کاربردهای زیادی در زندگی ما دارد. در هنگام قرارگیری مواد فرومغناطیس در میدانهای مغناطیسی، اتم این مواد تمایل به همراستایی با جهت میدان دارند. اگرچه اتم مواد فرومغناطیس تمایل به همراستایی با جهت میدان دارند، ناسازگاری در مواد تشکل دهنده و عوامل دیگری مانند نحوه ساختار بلوری آنها باعث ایجاد حوزههای مغناطیسی میشود.
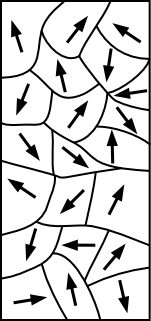
زمانی که حوزههای مغناطیسی در جهات تصادفی قرار گرفته باشند، حوزههای مجاور یکدیگر را خنثی کرده و باعث ایجاد مواد غیر مغناطیسی میشوند. هنگام قرارگیری مواد در معرض میدان مغناطیسی قوی، امکان همراستایی این حوزهها وجود دارد. با همراستا شدن این حوزههای مغناطیسی، میدان تقویت شده کلی، باعث ایجاد یک آهنربا میشود.
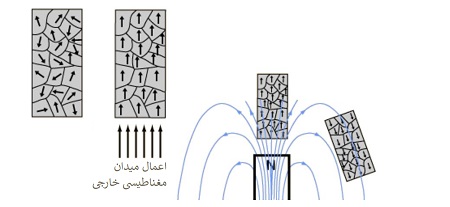
با توجه به قدرت میدان مغناطیسی، همراستایی اتمها میتوانند به صورت دائمی باشند.
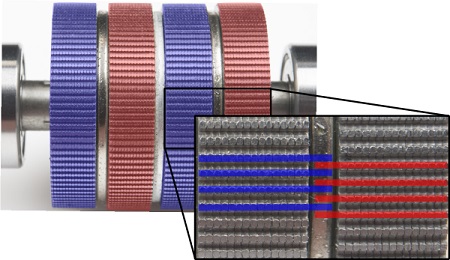
آهنرباهای دائمی
آهنرباهای دائمی مانند آهنرباهای الکتریکی عمل میکنند. تنها تفاوت بین این دو، دائمی بودن یا موقتی بودن آنهاست.
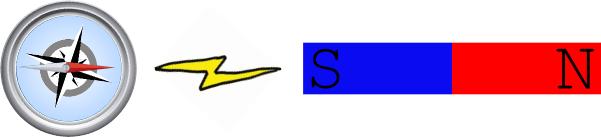
در همه شکلها، پیکانها از قطب شمال (N) خارج شده و به قطب جنوب (S) وارد میشوند. یک قرارداد دیگر برای تعیین قطبها، استفاده از رنگ قرمز برای قطب N و رنگ آبی برای قطب S است. برای تعیین قطبهای یک آهنربا، میتوان از یک قطبنما (Compass) استفاده کرد. از آنجایی که در آهنرباها قطبهای مخالف یکدیگر را جذب میکنند، با نزدیک کردن آهنربا به قطبنما، جهت شمال قطبنما، به سمت قطب S خواهد چرخید.
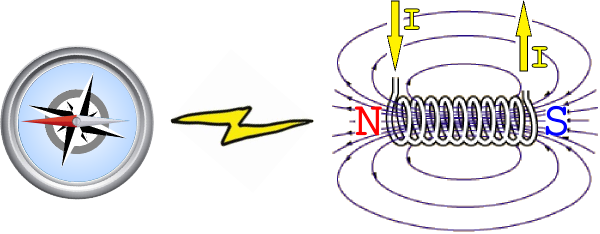
برای تعیین قطبهای یک آهنربای الکتریکی نیز میتوان از همین روش استفاده کرد.
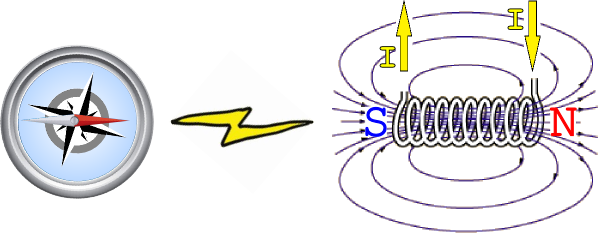
اگر جهت جریان معکوس شود، قطبهای آهنربای الکتریکی نیز معکوس میشوند. این یک اصل کلیدی برای ساخت موتورها است.
در بخش بعدی این پست، موتورهای براش و براشلس، تفاوت بین آنها و نحوه به کارگیری آهنرباها و آهنرباهای الکتریکی در آنها را توضیح خواهیم داد
")





")