You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
سوال درخصوص کنترل ربات صنعتی
- شروع کننده موضوع مازارو
- تاریخ شروع
ROBOTICS
کاربر فعال مهندسی رباتیک
هرگاه TCP ربات صنعتی بخواهد از نقطه A به نقطه B حرکت نماید و یا به شعاع مشخص دایره رسم نماید با فرض ثابت بودن سرعت و شتاب نمودار جریان اعمالی به هر یک از سروو موتور ها هنگامی که از چند روش کنترلی استفاده شود و دقت هر یک از این روشها بالا باشد چگونه خواهد بود؟ دلیل؟
اول موارد زیر را مشخص کن
۱- خودت می خواهی ربات بسازی یا از موارد آماده نظیر کوکا و ... می خواهی استفاده کنی
۲- رباتت چند درجه آزادی هست؟ و به چه صورتی است یعنی استوارت ، دلتا ، اسکارا و ...
با سلام
دوست عزیز بهتر نبود شما هم به سوال مطرح شده جواب میدادید؟
من قبلأ نیز برای شما نوشتم لازم نیست از روی ربات های صنعتی دیگر کپی برداری شود یا مثل پروژه تام ایران خودرو از بازوهای کوکا ،کنترلر اماده و ....
رباتی که قصد ساخت نمونه اولیه اش رو دارم شش درجه آزاد است با پی لودی در حدود پنجاه کیلو با طرح بدنه متمائل به ربات صنعتی 6600 شرکت ABB اما متفاوت به عنوان برندی جدید،با کنترلری که از صفر تا صدش متعلق به خودم است با زبان برنامه نویسی استاندارد مخصوص رباتهای صنعتی یعنی دستوراتی همچون PTP,Lin و ۰۰۰
حال امکان دارد شما نیز به سوال مطرح شده جواب بدهید؟
با سپاس
دوست عزیز بهتر نبود شما هم به سوال مطرح شده جواب میدادید؟
من قبلأ نیز برای شما نوشتم لازم نیست از روی ربات های صنعتی دیگر کپی برداری شود یا مثل پروژه تام ایران خودرو از بازوهای کوکا ،کنترلر اماده و ....
رباتی که قصد ساخت نمونه اولیه اش رو دارم شش درجه آزاد است با پی لودی در حدود پنجاه کیلو با طرح بدنه متمائل به ربات صنعتی 6600 شرکت ABB اما متفاوت به عنوان برندی جدید،با کنترلری که از صفر تا صدش متعلق به خودم است با زبان برنامه نویسی استاندارد مخصوص رباتهای صنعتی یعنی دستوراتی همچون PTP,Lin و ۰۰۰
حال امکان دارد شما نیز به سوال مطرح شده جواب بدهید؟
با سپاس
آخرین ویرایش:
ROBOTICS
کاربر فعال مهندسی رباتیک
خیر.دوست عزیز بهتر نبود شما هم به سوال مطرح شده جواب میدادید؟
من تا کل صورت مسئله را نفهمم نمی توانم جواب بدهم
هر چیزی را که شما بنویسید را که من قبول ندارممن قبلأ نیز برای شما نوشتم لازم نیست از روی ربات های صنعتی دیگر کپی برداری شود یا مثل پروژه تام ایران خودره از بازوهای کوکا ،کنترلر اماده و ....
صد بار دیگر هم بنویسید قبول ندارم
بحث هم نمی کنم چون فایده ای ندارد
رباتی که قصد ساخت نمونه اولیه اش رو دارم شش درجه آزاد است با پی لودی در حدود پنجاه کیلو با طرح بدنه متمائل به ربات صنعتی 6600 شرکت ABB اما متفاوت به عنوان برندی جدید،با کنترلری که از صفر تا صدش متعلق به خودم است با زبان برنامه نویسی استاندارد مخصوص رباتهای صنعتی یعنی دستوراتی همچون PTP,Lin و ۰۰۰
حال امکان دارد شما نیز به سوال مطرح شده جواب بدهید؟
با توضیحاتتان یک چیز هایی مشخص شد ولی هنوز صورت مسئله کامل نشده
موتورتان چیست؟ شماره و مدلش مهم نیست. ساختمانش مهم است
دی سی براش - دی سی براشلس - سروو موقعیت - سروو سرعت - سروو گشتاور - القایی قفسه سنجابی و ...؟
با سلام
جالب بود، خوشم اومد ولی دوست عزیز قرار نیست من خودم رو برای کسی بقبولانم و نیازی هم به اون ندارم اگر شما مطالبی که من می نویسم رو قبول ندارید دیگر مشکل از من نیست شما نخونید
 .
.در خصوص سوال شما دوست عزیزمی خوام غیر مستقیم جواب بدم چون شما به سوال من جواب ندادید من قبلأ کمی در خصوص نحوه کنترل ربات صنعتی نوشتم به هنگام طراحی یک ربات صنعتی برای تعیین توان و نوع سروو موتورعوامل زیادی دخیل هستند وزنی که ربات صنعتی به عنوان پی لود می تواند تحمل کند و میزان دسترسی ربات ،توان تبدیل گیربکسها و غیره با توجه به اینکه وزن خود سروو ها در وزن بازوها و تانسور لختی انها دخیل است هرچه این موتورها وزن کم و توان بالا داشته باشند راندمان ربات بهتر می شود بنابر این سرووهای DC کنار می روند و با توجه به اینکه در کنترلر ما گشتاور محاسبه و به سروو اعمال می شود جواب شما براشلس.... است.
با سپاس
ROBOTICS
کاربر فعال مهندسی رباتیک
کنترل تطبیقی مد لغزشی بدون چترینگ (با استفاده از تابع تانژانت هیپربولیک به جای تابع علامت)
چرا؟ چون
۱- غیر خطی است و از ترم های مهم صرف نظر نمی شود
۲- مقاوم است و اگر تغییرات کمی ایجاد شود (مثلا چند گرم) مشکلی پیش نمی آید
۳- وفقی است و خود را بار های متفاوت تطبیق می دهد
۴- به موتور فشار نمی آید. چون چترینگ ندارد
۵- با توجه به تعیین ضرایب می توان فروجهش و فراجهش را از بین برد (در رباتیک بسیار مهم است)
البته قطب ها باید طوری طراحی شده باشد که پدیده فراجهش و فروجهش رخ ندهد
شما می توانید از بهینه سازی نیز استفاده کنید تا کنترلتان در انرژی نیز بهینه شود
کد:
adaptive chattering-free sliding mode control (with hyperbolic tangent)چرا؟ چون
۱- غیر خطی است و از ترم های مهم صرف نظر نمی شود
۲- مقاوم است و اگر تغییرات کمی ایجاد شود (مثلا چند گرم) مشکلی پیش نمی آید
۳- وفقی است و خود را بار های متفاوت تطبیق می دهد
۴- به موتور فشار نمی آید. چون چترینگ ندارد
۵- با توجه به تعیین ضرایب می توان فروجهش و فراجهش را از بین برد (در رباتیک بسیار مهم است)
البته قطب ها باید طوری طراحی شده باشد که پدیده فراجهش و فروجهش رخ ندهد
شما می توانید از بهینه سازی نیز استفاده کنید تا کنترلتان در انرژی نیز بهینه شود
با سلام
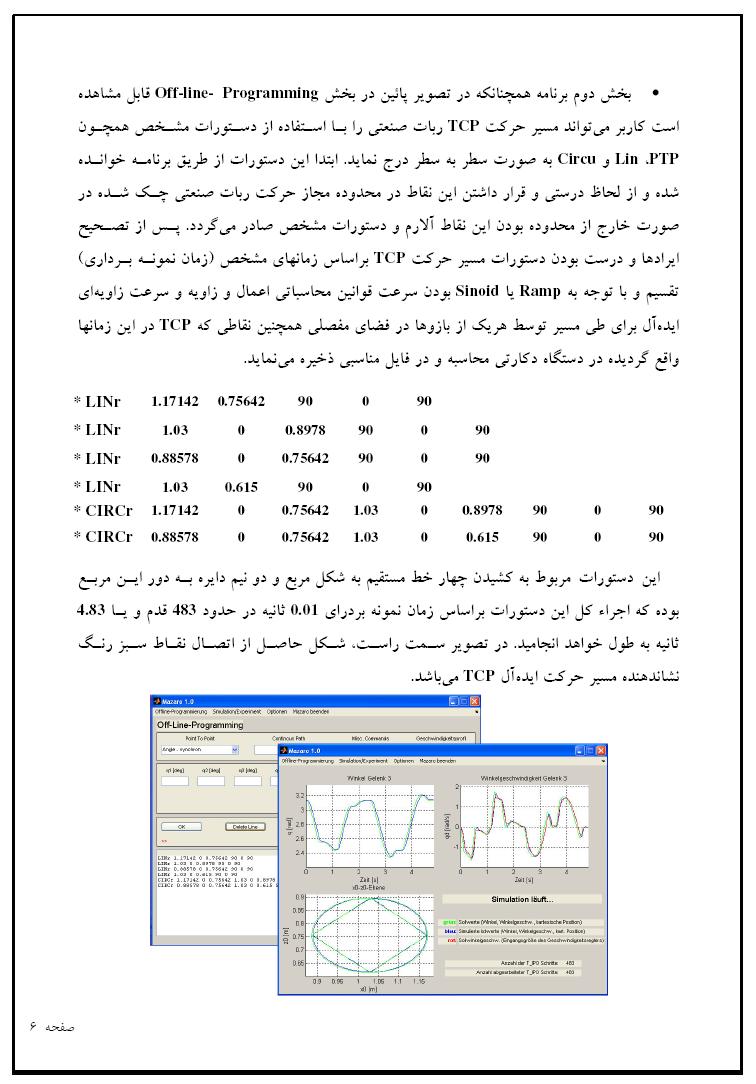
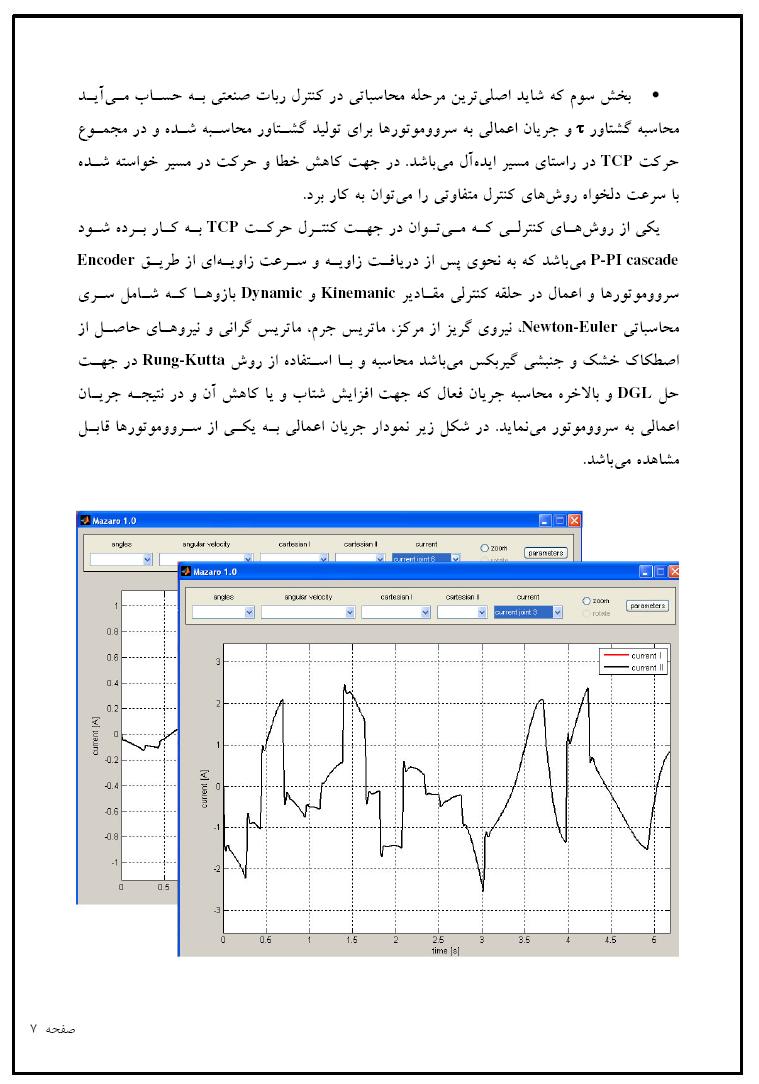
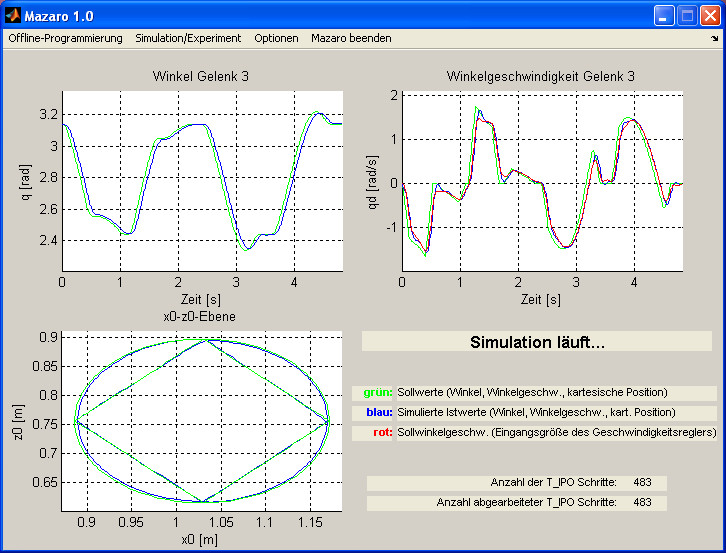
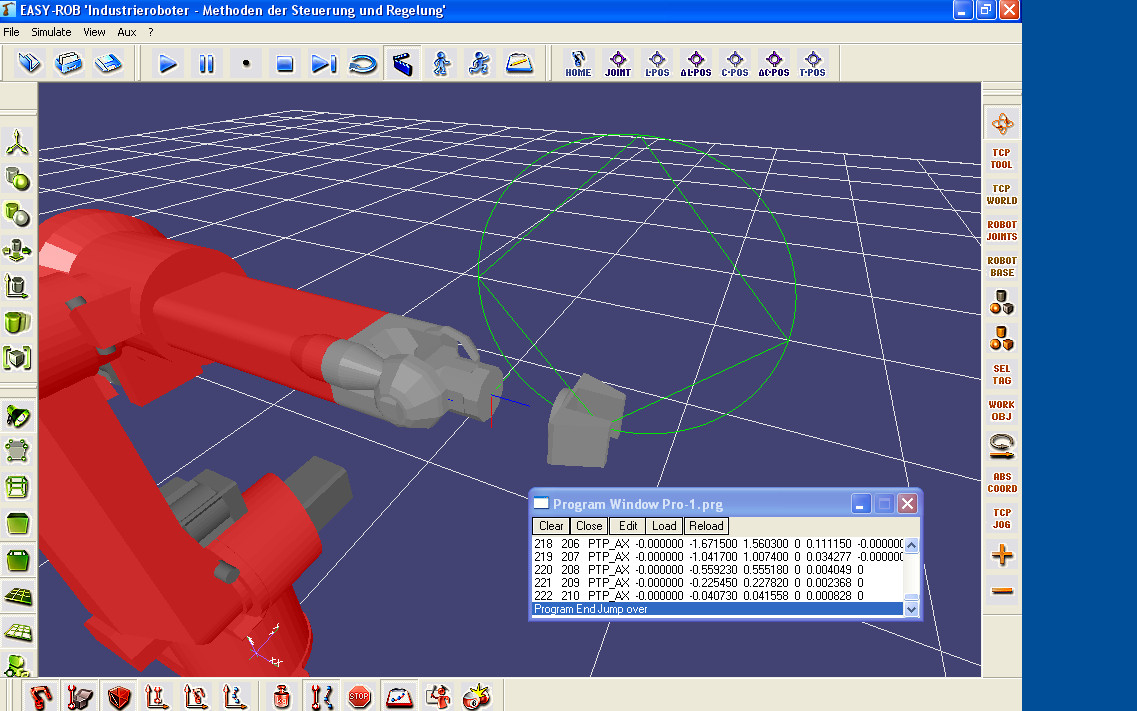
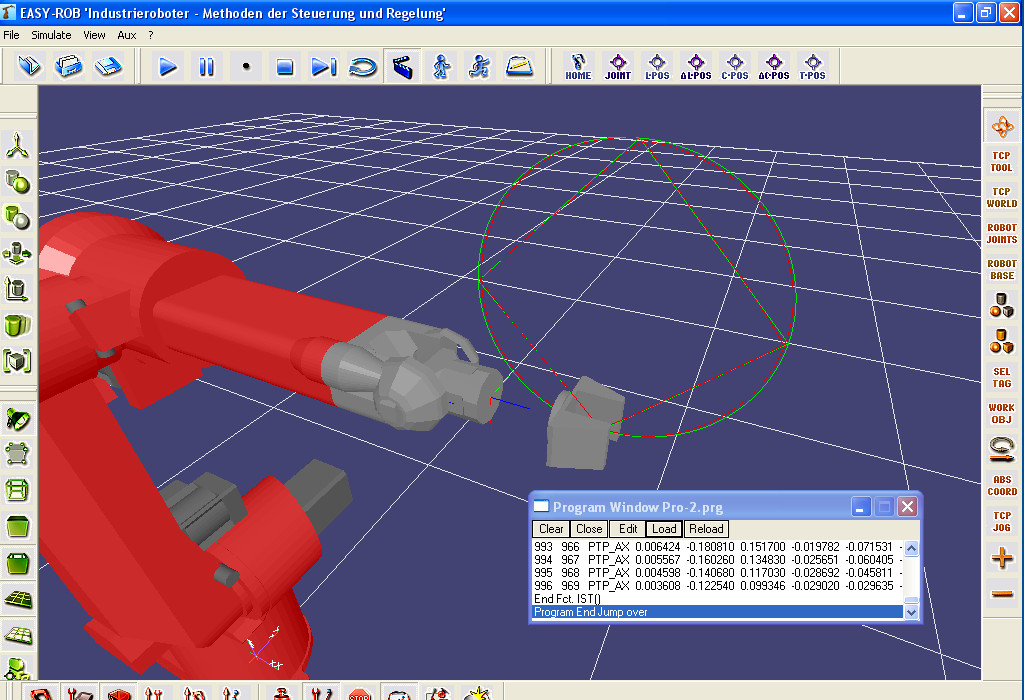
دوست عزیزاولأ من از شما بدلیل پاسختان تشکر میکنم اما شاید شما صورت مسئله را با دقت نخوندید من نوع کنترولر را نپرسیدم بلکه گفتم چنانکه شما از چند روش کنترلی متفاوت استفاده کنید(مثلأ P&PI یا MPPI یا فازی یا روشی که شما نوشتید یا ۲+۱ یا هر روش دیگر) چنانکه هر یک از این روشها دقت بالایی داشته باشند و سرعت و شتاب ثابت در نظر گرفته شود و مسیرTCP نیز مشخص باش مثلأ یک دایره به شعاع مشخص نمودار جریان اعمالی به سروو موتورها برای طی این مسیرچگونه خواهد بود؟ جواب این است که این نمودارها در صورت بالا بودن دقت کنترلرها بر هم منطبق خواهند بود یعنی نوع کنترلر در میزان جریانی که باید در هر لحظه به سروو موتورها باید داده شود نقشی ایفا نمی کند با توجه به ساختار ربات صنعتی همچون وزن بازوها ،نقاط ثقل ،تانسور لختی که همه اینها اعداد ثابتی هستند و تغییر نمی کنند برای اینکه TCPربات مسیر مشخصی را با سرعت و شتاب مشخص طی نماید (مسیر ایدآل ) باید جریان مشخصی (جریان ایدآل) در هرلحظه به سروو موتورها اعمال شود(دقت بالا در کنترلر بدین معنی است نمودار جریان نزدیک به نمودار جریان ایدآل می باشد).
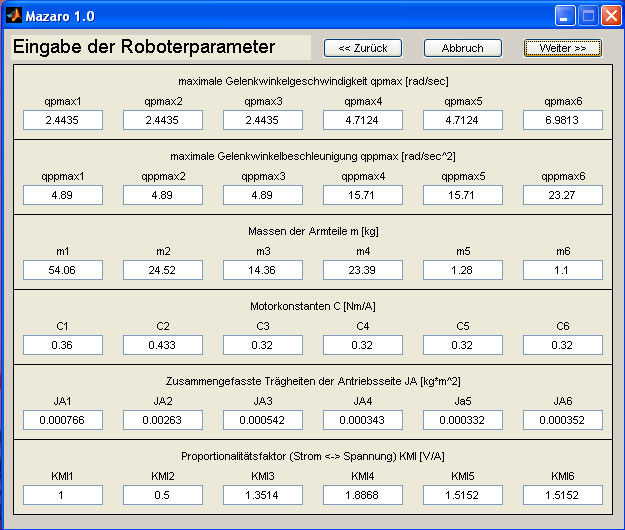
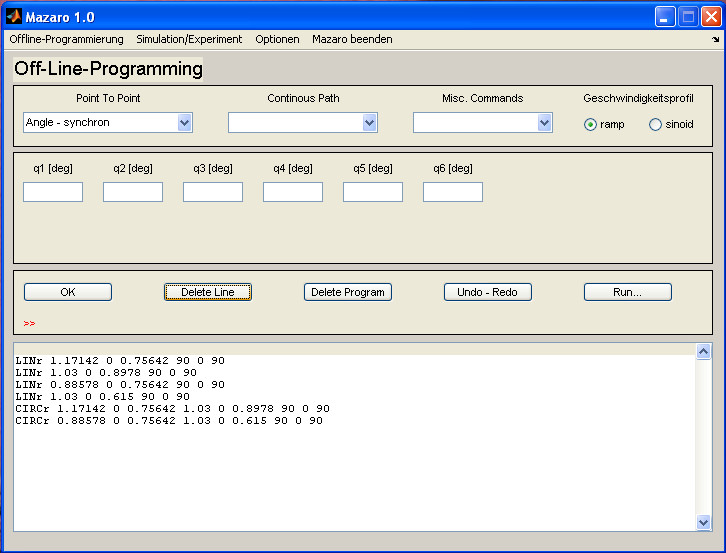
در روزهای اینده عکس هایی از منوی برنامه کنترلر،پارامترهای ربات صنعتی و فیلمی از نحوه سیموله مسیر در محیط EASY-ROB با توضیهاتی کوتاه قرار میدم تا شما دوست عزیز باورتان بشه و لازم نباشه که من صد باربنویسم (شنیدن کی بود مان......)
با سپاس
دوست عزیزاولأ من از شما بدلیل پاسختان تشکر میکنم اما شاید شما صورت مسئله را با دقت نخوندید من نوع کنترولر را نپرسیدم بلکه گفتم چنانکه شما از چند روش کنترلی متفاوت استفاده کنید(مثلأ P&PI یا MPPI یا فازی یا روشی که شما نوشتید یا ۲+۱ یا هر روش دیگر) چنانکه هر یک از این روشها دقت بالایی داشته باشند و سرعت و شتاب ثابت در نظر گرفته شود و مسیرTCP نیز مشخص باش مثلأ یک دایره به شعاع مشخص نمودار جریان اعمالی به سروو موتورها برای طی این مسیرچگونه خواهد بود؟ جواب این است که این نمودارها در صورت بالا بودن دقت کنترلرها بر هم منطبق خواهند بود یعنی نوع کنترلر در میزان جریانی که باید در هر لحظه به سروو موتورها باید داده شود نقشی ایفا نمی کند با توجه به ساختار ربات صنعتی همچون وزن بازوها ،نقاط ثقل ،تانسور لختی که همه اینها اعداد ثابتی هستند و تغییر نمی کنند برای اینکه TCPربات مسیر مشخصی را با سرعت و شتاب مشخص طی نماید (مسیر ایدآل ) باید جریان مشخصی (جریان ایدآل) در هرلحظه به سروو موتورها اعمال شود(دقت بالا در کنترلر بدین معنی است نمودار جریان نزدیک به نمودار جریان ایدآل می باشد).
در روزهای اینده عکس هایی از منوی برنامه کنترلر،پارامترهای ربات صنعتی و فیلمی از نحوه سیموله مسیر در محیط EASY-ROB با توضیهاتی کوتاه قرار میدم تا شما دوست عزیز باورتان بشه و لازم نباشه که من صد باربنویسم (شنیدن کی بود مان......)
با سپاس
ROBOTICS
کاربر فعال مهندسی رباتیک
مسیرTCP نیز مشخص باش مثلأ یک دایره به شعاع مشخص نمودار جریان اعمالی به سروو موتورها برای طی این مسیرچگونه خواهد بود؟
شما حتما نمودار جریان «مد لغزشی ساده» را با «مد لغزشی بدون چترینگ» اینجا بگذار
هر چه دقت بیشتر شود جریان (نمودار) این دو کنترلر تفاوت بیشتری خواهد کرد
با سلام
دوست عزیز نمودار جریان متفاوت یعنی گشتاور متفاوت و گشتاور متفاوت یعنی مسیر TCP متفاوت یعنی خارج از مسیر اصلی وخواسته شده یعنی عدم دقت.
دوست عزیز من امکان آپلود تصاویر رو ندارم چون از طریق تلویزیون به اینترنت وصل میشم اگر امکان است آدرس ایمیل خود رابرام بنویسید تا انها را براتون بفرستم بعد از مطالعه لطف کنید اینجا قرار دهید.
با سپاس
دوست عزیز نمودار جریان متفاوت یعنی گشتاور متفاوت و گشتاور متفاوت یعنی مسیر TCP متفاوت یعنی خارج از مسیر اصلی وخواسته شده یعنی عدم دقت.
دوست عزیز من امکان آپلود تصاویر رو ندارم چون از طریق تلویزیون به اینترنت وصل میشم اگر امکان است آدرس ایمیل خود رابرام بنویسید تا انها را براتون بفرستم بعد از مطالعه لطف کنید اینجا قرار دهید.
با سپاس
ROBOTICS
کاربر فعال مهندسی رباتیک
درستنمودار جریان متفاوت یعنی گشتاور متفاوت
نادرستگشتاور متفاوت یعنی مسیر TCP متفاوت یعنی خارج از مسیر اصلی وخواسته شده یعنی عدم دقت.
مسیر با انتگرال دوم گشتاور رابطه دارد و نه خود گشتاور
نمونه بسیار ساده
۱+۱=۲
۰+۲=۲
۳-۱=۲
و ...
نوشتن آدرس ایمیل بر خلاف قوانین فروم استدوست عزیز من امکان آپلود تصاویر رو ندارم چون از طریق تلویزیون به اینترنت وصل میشم اگر امکان است آدرس ایمیل خود رابرام بنویسید تا انها را براتون بفرستم بعد از مطالعه لطف کنید اینجا قرار دهید.
آدرس را پیام خصوصی می دهم
با سلام
دوست عزیز مشکل شما در اون پایه پایه هاست شما در تاپیکهای قبلی نوشتید که ما در ربات صنعتی مسیر ایدئال نداریم این مشکل به اون قسمت برمیگرده .
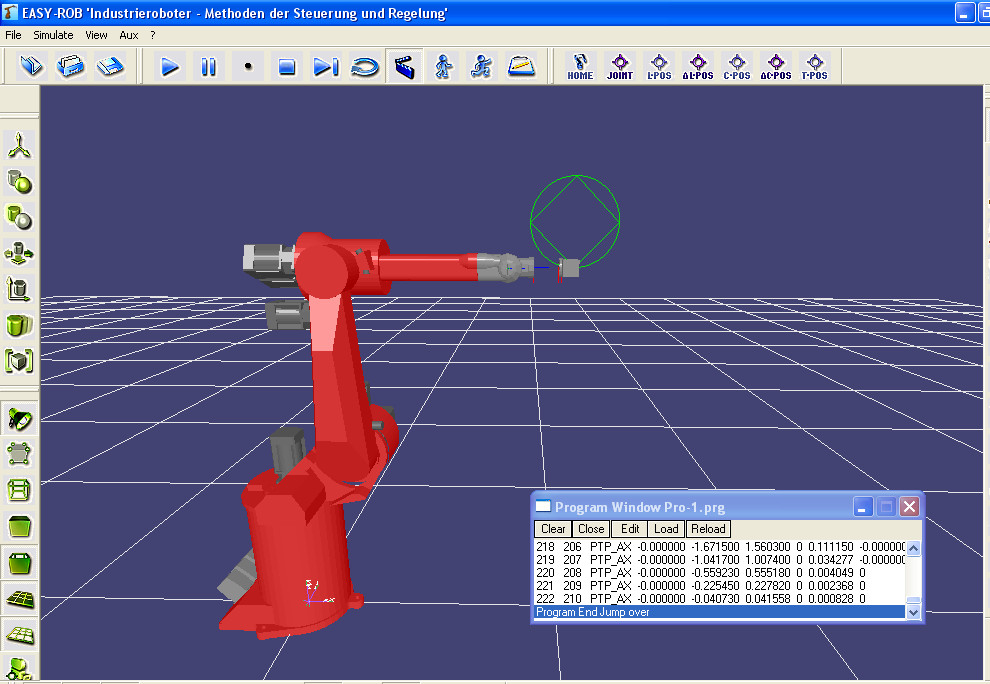
فیلم کوتاهی براتون ایمیل میزنم که نحوه سیموله برنامه نوشته شده را در EASY-ROB نشون میده ولی mp4 هست چون با مبایل از مونیتور گرفتم .
با سپاس
دوست عزیز مشکل شما در اون پایه پایه هاست شما در تاپیکهای قبلی نوشتید که ما در ربات صنعتی مسیر ایدئال نداریم این مشکل به اون قسمت برمیگرده .
فیلم کوتاهی براتون ایمیل میزنم که نحوه سیموله برنامه نوشته شده را در EASY-ROB نشون میده ولی mp4 هست چون با مبایل از مونیتور گرفتم .
با سپاس
ROBOTICS
کاربر فعال مهندسی رباتیک
۱- فیلمی ایمیل نزدید. چند تا عکس بود که در تاپیک گذاشتم.با سلام
دوست عزیز مشکل شما در اون پایه پایه هاست شما در تاپیکهای قبلی نوشتید که ما در ربات صنعتی مسیر ایدئال نداریم این مشکل به اون قسمت برمیگرده .
فیلم کوتاهی براتون ایمیل میزنم که نحوه سیموله برنامه نوشته شده را در EASY-ROB نشون میده ولی mp4 هست چون با مبایل از مونیتور گرفتم .
با سپاس
۲- از نوشته ها معلوم نیست که کدام مورد زیر را پیاده کردید
الف) محاسبه گشتاور مورد نیاز بر حسب خطا (درون حلقه کنترلی) یا همان روش حلقه بسته
ب) محاسبه گشتاور بر حسب فرمول های دینامیک (قبل از حلقه کنترل) و ارسال آن به عنوان خروجی مطلوب کنترلر یا همان روش حلقه باز
حدس می زنم شما روش ب را رفتید
بازو های مکانیکی اولیه (همان هایی که در سال های ۱۹۶۰ تا ۱۹۷۰ تولید می شد) اصلا گشتاور را حساب نمی کردند. هنوزهم بازو های مکانیکی بسیار ارزان قیمت از این روش استفاده می کنند.
بازو های مکانیکی ثانویه (همان هایی که در سال های ۱۹۸۰ تا ۲۰۰۰ تولید می شد) از روش ب (حلقه باز) استفاده می کردند. هنوزهم بازو های مکانیکی ارزان و متوسط قیمت از این روش استفاده می کنند.
بازو های مکانیکی مدرن (همان هایی که از سال های ۲۰۰۰ به بعد تولید می شود) از روش الف (حلقه بسته) استفاده می کردند. بازوهای مکانیکی گران قیمت از این روش استفاده می کنند به عبارتی پول تکنولوژی اشان را می گیرند
با سلام و تشکر از دوست گرامی
دوست عزیز ربات صنعتی همواره در مفهوم مدرن آن مطرح بوده یعنی شرکتهایی همچون KUKA , ABB یا REIS هرگز از کنترل حلقه باز استفاده نمی کنند و در این روش نیز استفاده نشده .سرعت و شتاب متغییر برای TCPدر حلقه باز بدون فیدبک گرفتن از انکدرها امکانپذیر نیست همچنین مفهوم کنترل P&PI یاMPPI یعنی گرفتن زاویه کنونی مفاصل وتعیین اختلاف زاویها(بخش P) و گرفتن مشتق زاویه یا سرعت مفاصل و تعیین اختلاف سرعت زاویها (بخش PI) و اعمال نتیجه کنترلر در پرسه تا این اختلافات به صفر تمایل یابند یعنی مسیر خواسته شده با سرعت و شتاب خواسته شده دنبال شود.
متاسفانه نتونستم فیلم نحوه سیمولاسیون برنامه رو براتون بفرستم فکر میکنم mp4 بودن ان مشکل کار است.
با سپاس
دوست عزیز ربات صنعتی همواره در مفهوم مدرن آن مطرح بوده یعنی شرکتهایی همچون KUKA , ABB یا REIS هرگز از کنترل حلقه باز استفاده نمی کنند و در این روش نیز استفاده نشده .سرعت و شتاب متغییر برای TCPدر حلقه باز بدون فیدبک گرفتن از انکدرها امکانپذیر نیست همچنین مفهوم کنترل P&PI یاMPPI یعنی گرفتن زاویه کنونی مفاصل وتعیین اختلاف زاویها(بخش P) و گرفتن مشتق زاویه یا سرعت مفاصل و تعیین اختلاف سرعت زاویها (بخش PI) و اعمال نتیجه کنترلر در پرسه تا این اختلافات به صفر تمایل یابند یعنی مسیر خواسته شده با سرعت و شتاب خواسته شده دنبال شود.
متاسفانه نتونستم فیلم نحوه سیمولاسیون برنامه رو براتون بفرستم فکر میکنم mp4 بودن ان مشکل کار است.
با سپاس
آخرین ویرایش:
ROBOTICS
کاربر فعال مهندسی رباتیک
با سلام و تشکر از دوست گرامی
دوست عزیز ربات صنعتی همواره در مفهوم مدرن آن مطرح بوده یعنی شرکتهایی همچون KUKA , ABB یا REIS هرگز از کنترل حلقه باز استفاده نمی کنند و در این روش نیز استفاده نشده .سرعت و شتاب متغییر برای TCPدر حلقه باز بدون فیدبک گرفتن از انکدرها امکانپذیر نیست همچنین مفهوم کنترل P&PI یاMPPI یعنی گرفتن زاویه کنونی مفاصل وتعیین اختلاف زاویها(بخش P) و گرفتن مشتق زاویه یا سرعت مفاصل و تعیین اختلاف سرعت زاویها (بخش PI) و اعمال نتیجه کنترلر در پرسه تا این اختلافات به صفر تمایل یابند یعنی مسیر خواسته شده با سرعت و شتاب خواسته شده دنبال شود.
متاسفانه نتونستم فیلم نحوه سیمولاسیون برنامه رو براتون بفرستم فکر میکنم mp4 بودن ان مشکل کار است.
با سپاس
در همان بازو های اولیه که اصلا مفهوم گشتاور جایگاهی ندارد نیز اختلاف زاویه و سرعت زاویه (همان مشتق) استفاده می شود.
کنترلر هر مفصل با داشتین زاویه و سرعت آن ، ورودی مطلوب را حساب می کند تا اختلاف صفر برسد
و بازو مسیر با سرعت و شتاب خواسته شده را می پیمود
به عبارت دیگر محاسبه و استفاده از زاویه و سرعت زاویه ای دلیلی بر حلقه بسته بودن ندارد
من که کنترلر شما را ندیدم. شاید حلقه بسته باشد.
با سلام و تشکر از شما
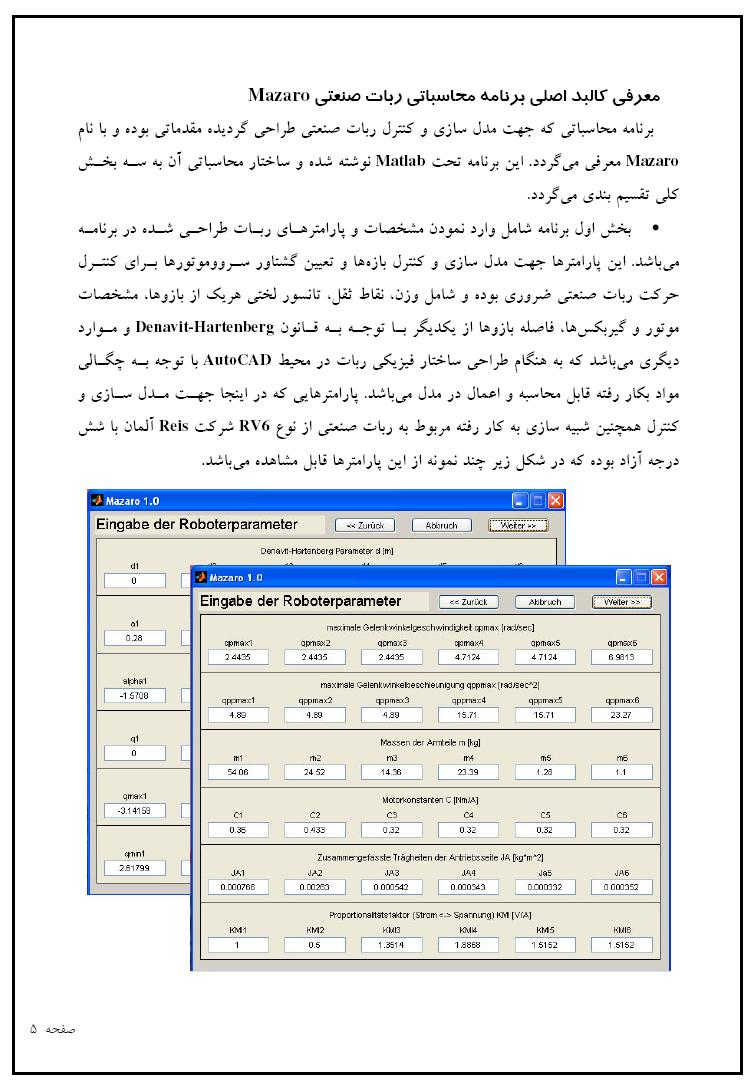
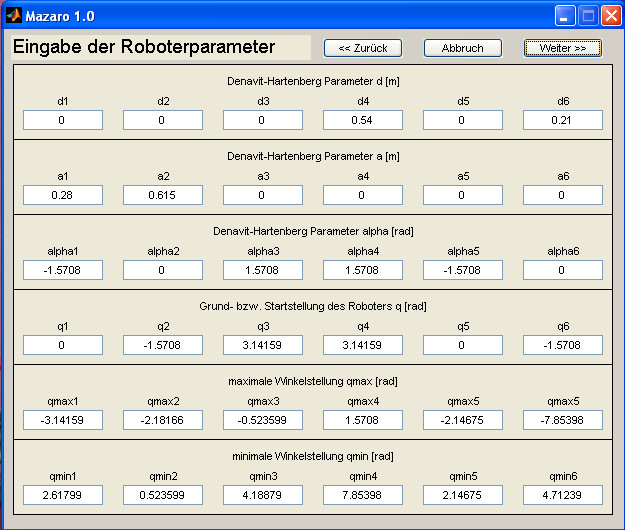
دوست عزیز تصاویری که فرستاده شده تنها ورودی پارامترها به برنامه است و ساختار کنترلی در سورس برنامه البته من دو تصویر دیگر از ورودی ضرایب کنترلر وبلوک دیاگرام کنترلر را فرستادم ولی قبول کنید که برخی مطالب Know How حساب می شوند.
من برنامه کنترلر را به سه بخش تقسیم کردم بهتر است شما بخش دوم یعنی گرفتن دستورات و نحوه میانیابی را دوباره مطالعه بفرمایید تعیین مسیر ایدئال بسیار مهم است چون gهای بدست امده به عنوان ست پوینت (sp) مسیر در لحظه های نمونه برداری می باشند.
با سپاس
دوست عزیز تصاویری که فرستاده شده تنها ورودی پارامترها به برنامه است و ساختار کنترلی در سورس برنامه البته من دو تصویر دیگر از ورودی ضرایب کنترلر وبلوک دیاگرام کنترلر را فرستادم ولی قبول کنید که برخی مطالب Know How حساب می شوند.
من برنامه کنترلر را به سه بخش تقسیم کردم بهتر است شما بخش دوم یعنی گرفتن دستورات و نحوه میانیابی را دوباره مطالعه بفرمایید تعیین مسیر ایدئال بسیار مهم است چون gهای بدست امده به عنوان ست پوینت (sp) مسیر در لحظه های نمونه برداری می باشند.
با سپاس
ROBOTICS
کاربر فعال مهندسی رباتیک
ولی قبول کنید که برخی مطالب Know How حساب می شوند.
وقتی از نظر شما این موارد (کنترلر) جز مطالب ضمنی است ، دیگر چیزی برای گفتن باقی نمی ماند.
======================
فقط دو جمله با کاربران تازه وارد (نه متخصصین)
کاربر مازارو فقط یک روش از روش های را به کار برده است. روش های بسیار دیگری وجود دارد که به گشتاوهای دیگر می رسند
با سلام
دوست عزیز اینگونه صحبت کردنها برای شما آسان است بلاخره کار و یا انرژی صرف نکرده اید اگر شما نیز برای یک مشکل کوچک روزها مخ خود را می خوردید اینگونه صحبت نمی کردید بهتره شما بیاید یکی از روشهایی که بلد هستید را توضیح بدید و کارکردی عینی برای آن نشان بدید بعد اینگونه درخصوص کار دیگری قضاوت کنید.
در خصوص وضعیت رباتیک در ایران هم زیاد قصه نخورید تا دهه ها همین وضعه وقتی مهندسی میاد و تاپیکی با عنوان ٍوقتی وارد حمام می شید اول کجای بدن خود را می شوییدٍ را میزنه همه جواب میدن و تشکرهم می کنند لازو نیست که دل من وتو برای اونها بسوزه.
با سپاس
دوست عزیز اینگونه صحبت کردنها برای شما آسان است بلاخره کار و یا انرژی صرف نکرده اید اگر شما نیز برای یک مشکل کوچک روزها مخ خود را می خوردید اینگونه صحبت نمی کردید بهتره شما بیاید یکی از روشهایی که بلد هستید را توضیح بدید و کارکردی عینی برای آن نشان بدید بعد اینگونه درخصوص کار دیگری قضاوت کنید.
در خصوص وضعیت رباتیک در ایران هم زیاد قصه نخورید تا دهه ها همین وضعه وقتی مهندسی میاد و تاپیکی با عنوان ٍوقتی وارد حمام می شید اول کجای بدن خود را می شوییدٍ را میزنه همه جواب میدن و تشکرهم می کنند لازو نیست که دل من وتو برای اونها بسوزه.
با سپاس
آخرین ویرایش:
ROBOTICS
کاربر فعال مهندسی رباتیک
دوست عزیز اینگونه صحبت کردنها برای شما آسان است بلاخره کار و یا انرژی صرف نکرده اید اگر شما نیز برای یک مشکل کوچک روزها مخ خود را می خوردید اینگونه صحبت نمی کردید بهتره شما بیاید یکی از روشهایی که بلد هستید را توضیح بدید و کارکردی عینی برای آن نشان بدید بعد اینگونه درخصوص کار دیگری قضاوت کنید.
شاید اکنون در جواب دادن به شما انرژی که مد نظر شما است را صرف نکردم. اما قبل تر از این که شما در این فروم پست اولتان را بنویسید وقت های بسیاری را گذاشتم
من روش شما را رد نکردم. گفتم روش های بهتر و بدتر (اما آسان تر) دیگر وجود دارد.
نظر من این است که راه های بسیاری برای کنترل کردن وجود دارد. حالا شما یک روش را رفتید. همین هم ارزش بسیار دارد.
من خوشحال می شوم که بشنوم بازوی مکانیکی شما به مرحله تولید (نه آزمایشگاهی بلکه انبوه) رسیده باشد.
توی صنعت ایران ، که اصلا تولید کننده بازو نیست ، حتی روش هایی که گشتاور را حساب نمی کنند نیز غنیمت است، چه برسد به کار شما که گشتاور را نیز دخالت داده اید
اما بدان که ساخت ربات بسیار سخت تر از طراحی آن است. همچنین صنعتی سازی آن (تولید و فروش و پشتیبانی) بسیار سخت تر از ساخت آن است.
هر وقت نمونه آزمایشگاهی اش را ساختی خبرش را در سایت «انجمن رباتیک ایران» قرار برده.
با سلام
دوست عزیز روش آسانی وجود نداره هنوز وقتی شما وارد مقوله محاسبه ماتریس جرم و یا بردار گریز از مرکز میشید تازه مشکل شروع میشه و دلیل انحصاری بودن این تکنولوژی در این قسمتهاست چون با چیزهایی که در کتابها نوشته می شه فرق اساسی داره.
قبلأ دو تصویر دیگر براتون ارسال شده دوست داشتید اونها رو هم اینجا قرار بدید.
با سپاس.
دوست عزیز روش آسانی وجود نداره هنوز وقتی شما وارد مقوله محاسبه ماتریس جرم و یا بردار گریز از مرکز میشید تازه مشکل شروع میشه و دلیل انحصاری بودن این تکنولوژی در این قسمتهاست چون با چیزهایی که در کتابها نوشته می شه فرق اساسی داره.
قبلأ دو تصویر دیگر براتون ارسال شده دوست داشتید اونها رو هم اینجا قرار بدید.
با سپاس.
آخرین ویرایش:
ROBOTICS
کاربر فعال مهندسی رباتیک
قسمت دومش حرفتان درست استدوست عزیز روش آسانی وجود نداره هنوز وقتی شما وارد مقوله محاسبه ماتریس جرم و یا بردار گریز از مرکز میشید تازه مشکل شروع میشه و دلیل انحصاری بودن این تکنولوژی در این قسمتهاست.
اما روش آسان تر این است که اصلا وارد محاسبه گشتاور نشوید تا لازم باشد جرم و ... را حساب کنید
یعنی برای کنترل بازو , مجبور نیستیم دینامیک را بدست بیاوریم و دینامیک را کنترل کنیم. کافی است سینماتیک را بدست بیاوریم و سینماتیک را کنترل کنیم
کنترل دینامیکی بسیار بهتر از کنترل سینماتیکی است. همچنین کنترل دینامیکی بسیار سخت تر از کنترل سینماتیکی است
بازوهای اولیه (زمانی که اصلا abb وجود نداشت) همگی از روش کنترل سینماتیکی می رفتند
بازو های اولیه ابتدا با میکروپروسسور TMS1000 و بعد intel8008 با کار می کردند و بعد چند سال میکروپروسسور Z80 جایگزین شد.
خودتان می دانید که z80 چه قدر ضعیف است چه برسد به میکروپروسسور intel8008 و TMS1000 . آن زمان نه مایکروسافت ویندوز وجود داشت و نه نرم افزار متلب
خود شرکت کوکا که از قدیمی ترین شرکت های تولید کننده بازو است از میکروپروسسور TMS1000 استفاده می کرد. یک پروسسور 4 بیتی با فرکانس 400 کیلوهرتز است. الان سرعت ها گیگاهرتز هستند و نه کیلو! امروزه پردازنده ها 64 بیتی هستند و نه 4 بیتی
شرکت کوکا با همین میکروپروسسور TMS1000 بازوی جوشکار ساخت. فکر می کنید با این سرعت می شود دینامیک را کنترل کرد!
آن زمان شرکت کوکا از ویندوز و کلیه نرم افزار های قابل نصبش نظیر متلب و ایزی روب و ... بی بهره بود
همین الان نیز بعضی از شرکت های چینی گمنام در ایران (که فقط بازار مصرف داخلی چینی دارند) از همین روش کنترل سینماتیکی استفاده می کنند
روش کنترل سینماتیکی آنقدر آسان است که حتی در مسابقات رباتیک امیرکبیر لیگ «ربات های کار» چندیدن تیم از این روش استفاده می کنند.
البته سطح این تیم ها (نه قوانین و بستر مسابقات) ضعیف است ولی روش کنترل سینماتیکی ربات هایی که در این مسابقات شرکت می کنند کاملا مشابه (با همان کیفیت) روش کنترل سینماتیکی ربات های موجود در صنعت است
تمام تصاویری که ایمیل کردید را این جا گذاشتمقبلأ دو تصویر از ورودی ضرایب کنترلر براتون ارسال شده دوست داشتید اونها رو هم اینجا قرار بدید.
اگر باز هم می خواهید عکس دیگری بگذارم ایمیل کنید
با سلام
دوست عزیز یک سوال از شما دارم (البته چند سوال همچنین مشارکت دوستان دیگر هم باعث خوشحالی است)ایا در دانشگاه شما ربات صنعتی هست؟چند درجه آزاد است و پی لود آن چقدره و ایا در جای دیگر می توان به ربات صنعتی دسترسی داشته باشید که پی لودی بالای پنجاه کیلو داشته باشه؟
ایا دوست و یا همکاری دارید که در زمینه کالیبراسیون و تعمییر ربات صنعتی فعال باشد؟می خواستم بدونم کدامیک از پارامترها در بخش کالیبراسیون در دسترس بوده و قابل تغییر می باشند(منظور وزن بازوها،نقاط ثقل و تانسرلختی و غیره) و کدامیک از پارامترها را شرکت سازنده در اختیار کاربر قرار نمی دهد؟و از همه مهمتر اینکه ایا میتوان نمودار جریان وارد شده به سروو موتورها را در حرکت در یک مسیر مشخص در ربات واقعی را استخراج کرد؟
همچنین تصاویری از ساختار داخلی ربات صنعتی که توسط دوستان تعمییرکا گرفته شده میتواند کمک شایانی در طراحی برند جدید ایفا کند(برند جدید تلفیقی از مدل 6600 شرکت ABB و مدل RV6 شرکت REIS می باشد ولی از نظرات نیز استقبال می شود).
با سپاس
دوست عزیز یک سوال از شما دارم (البته چند سوال همچنین مشارکت دوستان دیگر هم باعث خوشحالی است)ایا در دانشگاه شما ربات صنعتی هست؟چند درجه آزاد است و پی لود آن چقدره و ایا در جای دیگر می توان به ربات صنعتی دسترسی داشته باشید که پی لودی بالای پنجاه کیلو داشته باشه؟
ایا دوست و یا همکاری دارید که در زمینه کالیبراسیون و تعمییر ربات صنعتی فعال باشد؟می خواستم بدونم کدامیک از پارامترها در بخش کالیبراسیون در دسترس بوده و قابل تغییر می باشند(منظور وزن بازوها،نقاط ثقل و تانسرلختی و غیره) و کدامیک از پارامترها را شرکت سازنده در اختیار کاربر قرار نمی دهد؟و از همه مهمتر اینکه ایا میتوان نمودار جریان وارد شده به سروو موتورها را در حرکت در یک مسیر مشخص در ربات واقعی را استخراج کرد؟
همچنین تصاویری از ساختار داخلی ربات صنعتی که توسط دوستان تعمییرکا گرفته شده میتواند کمک شایانی در طراحی برند جدید ایفا کند(برند جدید تلفیقی از مدل 6600 شرکت ABB و مدل RV6 شرکت REIS می باشد ولی از نظرات نیز استقبال می شود).
با سپاس
ROBOTICS
کاربر فعال مهندسی رباتیک
در دانشگاه دوره کارشناسی ام یک مورد خراب داشتایا در دانشگاه شما ربات صنعتی هست؟
همچنین دو مورد آزمایشگاهی
در دانشگاه ارشدم چیزی نبود
هر سه ربات ۶ درجه آزادی بودندچند درجه آزاد است و پی لود آن چقدره
و پی لود نزدیک صفر
ایا دوست و یا همکاری دارید که در زمینه کالیبراسیون و تعمییر ربات صنعتی فعال باشد؟
دارم اما محرمانه است
به شما پیشنهاد می کنم یه جای پست در این فروم ، در ***** پست بگذارید چون تمام کاربرانش بازو کار می کنند و توسط شرکت تعمیرات پشتیبانی می شود
با سلام
دوست عزیز شاید اولین تاپیک من که ربات صنعتی بود یاددتان هست،در دو سطر من کل هدف و مشکل پیش رو را نوشته بودم که یکی از مشکلات طراحی یک برند جدید و خارج نمودن پارامترهای ضروری آن بود و مشکل دوم بحث مالی طرح،با توجه به اینکه طراحی و محاسبات نقاط ثقل و تانسور لختی بادی ربات طراحی شده درحوزه فعالیت رشته مکانیک است و بدلیل نوپا بودن طرح در مراحل اولیه نمی توان مباحثی مالی و اسپانسورگیری و غیره را مطرح کرد بلکه در مرحله اول در یک طرح مشارکتی با کمک دوستانی که تمایل دارنه اقدام به طراحی بدنه ربات با مشخصات تعیین شده در سالید یا کتیا نمود (برخی از مشخصات از جمله نوع موتور و گیربکس باید قبلأ تعیین شوند) و از طرف دیگربرنامه کنترلی ربات را با مشخصات جدید تنظیم نمود و مرحله سیمولاسیون در easy-rob و ورود به فاز بعدی.
من در صورت تمایل شما سوالات خود رو به صورت پیام شخصی براتون ارسال میکنم (البته در صورت تمایل شما).
با سپاس
دوست عزیز شاید اولین تاپیک من که ربات صنعتی بود یاددتان هست،در دو سطر من کل هدف و مشکل پیش رو را نوشته بودم که یکی از مشکلات طراحی یک برند جدید و خارج نمودن پارامترهای ضروری آن بود و مشکل دوم بحث مالی طرح،با توجه به اینکه طراحی و محاسبات نقاط ثقل و تانسور لختی بادی ربات طراحی شده درحوزه فعالیت رشته مکانیک است و بدلیل نوپا بودن طرح در مراحل اولیه نمی توان مباحثی مالی و اسپانسورگیری و غیره را مطرح کرد بلکه در مرحله اول در یک طرح مشارکتی با کمک دوستانی که تمایل دارنه اقدام به طراحی بدنه ربات با مشخصات تعیین شده در سالید یا کتیا نمود (برخی از مشخصات از جمله نوع موتور و گیربکس باید قبلأ تعیین شوند) و از طرف دیگربرنامه کنترلی ربات را با مشخصات جدید تنظیم نمود و مرحله سیمولاسیون در easy-rob و ورود به فاز بعدی.
من در صورت تمایل شما سوالات خود رو به صورت پیام شخصی براتون ارسال میکنم (البته در صورت تمایل شما).
با سپاس
Similar threads
| Thread starter | عنوان | تالار | پاسخ ها | تاریخ |
|---|---|---|---|---|
| N | کنترل ربات متحرک | کنترل ربات | 2 | |
| S | کنترل از راه دور ربات | کنترل ربات | 8 | |
| M | کنترل ربات با دوربین ثابت | کنترل ربات | 3 | |
|
|
ربات خود کنترل با قابلیت تعقیب و تکرار مسیر | کنترل ربات | 19 | |
| R | کنترل ربات irb1400abb | کنترل ربات | 1 |